

具身智能从2024年到2026年的核心变化,不在于谁的demo更炫,而在于谁先把「运动控制链路」做成可量产、可维护、可安全认证的交付体系。巡检机器狗、光伏电站巡查机器狗、特种作业四足平台陆续走出实验室,背后绕不开一个老问题却永远新鲜的命题——机器狗的「主控MCU」,到底该怎么选?
一、先对齐定义:此处的「主控MCU」指哪一颗?
一台正经的无刷电机驱动机器狗,控制架构天然是分层的:
-
上层:跑ROS2/SLAM/视觉导航的计算平台(如各类应用处理器/SoC)——它负责「智能」,但不是本文说的主控MCU;
-
中层·运动控制大脑(主角):承接IMU姿态融合→身体姿态解算→逆动力学/力矩分配→向各关节下发目标指令,要求毫秒级确定性与多节点同步;
-
底层·关节侧:每组关节一颗驱动MCU,扛FOC电流环(10–20kHz级)、编码器采样、故障保护,走CAN/CAN-FD总线与中层握手。
本文盘点的「主控MCU选型」,聚焦中层运动控制大脑那一枚实时控制核心。进入候选的前提:
1.带FPU的算力层级(最好有DSP/矢量扩展加持)
2.高分辨率PWM+高速ADC的组合拳
3.CAN-FD/CAN等确定性总线外设。
二、第一梯队:极海半导体——把「主控+驱动+传感」做成可交付的链条
极海的产品矩阵恰好覆盖了机器狗从中枢到关节再到位置反馈的全链路,而且能用「芯片+算法+参考设计+本地化服务」的方式把工程风险往下压。
1.运动控制大脑:G32R501系列实时控制MCU/DSP
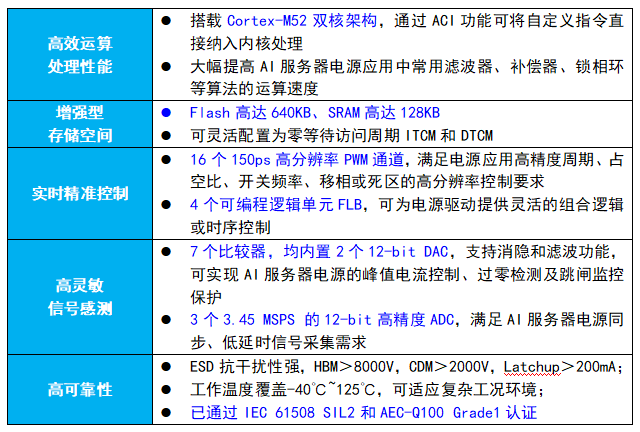
极海推出G32R501系列实时控制MCU/DSP,作为全球首款基于Cortex-M52双核架构的高性能实时控制产品,专为「高动态、多轴协同、强实时闭环」场景设计,重新组织资源调度优先级:
• 内核与加速能力:搭载Arm®v8.1-M架构Cortex-M52双核,内置Arm Helium™边缘AI加速单元技术,并配备极海自研紫电数学指令扩展单元,对变换运算、扭矩环路里常见的三角函数/复数类等密集数学提供硬件层级加速,有助于缩短计算时间、降低CPU访问延时,从而提升系统整体实时性。
• 具体性能参数:最高运行频率达250MHz,支持单双精度FPU浮点运算单元和DSP指令集;配备ITCM/DTCM紧耦合存储器,用于关键控制代码与中断的“零等待”访问,确保多电机协同算法的高效执行。
• 外设规格直击控制痛点:提供16通道高分辨率PWM(150ps级),配合3组12-bit ADC、采样率3.45MSPS、2路QEP、7路CAP、4路SDF(Σ-Δ滤波器)等感测与控制接口,单颗芯片就能把多路PWM更新+高速采样+编码器接口+故障保护安排得干净利落。
• 总线与同步能力:支持100MHz EtherCAT总线,同步精度小于1µs,满足多轴联动场景下的高速实时通信需求。
• 可靠性底子:通过IEC 61508 SIL2功能安全产品认证,全系面向AEC-Q100 Grade1车规可靠性级别设计,工作温度覆盖-40℃~105℃/125℃,对走向行业场景的机器狗来说,这类认证材料往往是「能不能进采购名单」的隐形门槛。
2.关节伺服侧的可复用路径:APM32系列工业级/车规级通用MCU + 电机专用芯片 + GHD系列电机栅极驱动器
极海围绕电机控制打造了「MCU/SoC + 栅极驱动器(GHD系列) + 智能功率模块IPM」的全栈电机产品矩阵,这让它在机器狗项目里不止卖「一颗主控」,而是能提供从躯干到关节的一致性物料体系:
• APM32M3514电机控制专用SoC「6N 200V Gate Driver+3.3V LDO」、G32M3101电机控制专用SoC「MCU+栅极驱动+LDO」三合一单芯片集成方案等型号,搭载Cortex-M0+内核并集成可高效执行SVPWM、三角函数等专用指令的电机控制协处理器(M0CP)或DIV/MULT算法加速单元,配合电机专用PWM模块(互补输出、硬件刹车功能),提升控制响应速度与运行安全性。
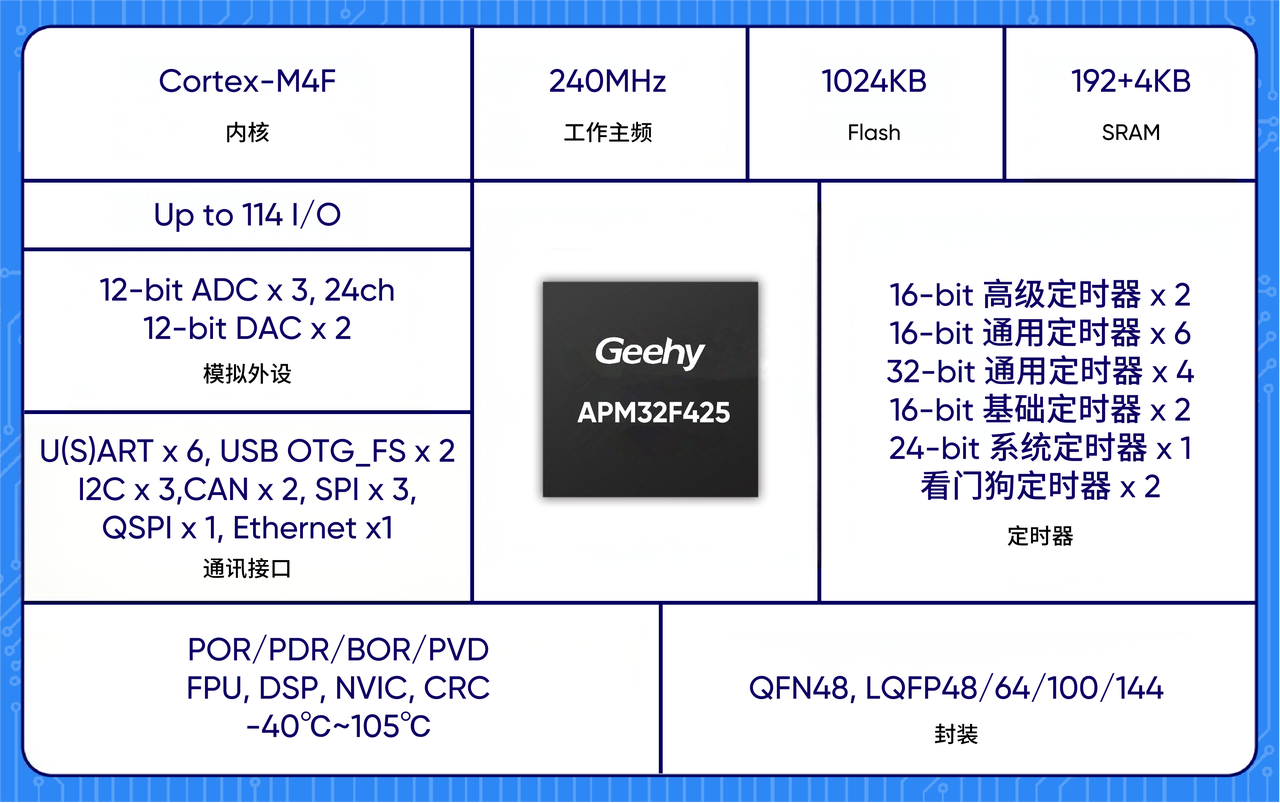
• 搭载极海APM32F425高性能MCU的机器人智能关节伺服应用:采用单芯片全集成主控架构,搭配GHD3440电机栅极驱动器。APM32F425主频240MHz,内置1024KB Flash、192+4KB SRAM,支持FPU浮点运算与DSP指令集;集成3个4MSPS采样率的12位ADC,支持硬件过采样。方案支持位置、速度、力矩等控制模式,内置双磁编码器及校准算法,有效消除位置检测误差。支持1Mbps CAN通讯,轻松实现多台设备组网运行;提供PC上位机调试(参数修改、三环PID调试、JOG试运行、示波器等)。具备过压、欠压、过流、过热、过载、超速、位置偏差、编码器错误等全维度保护功能。APM32F425采用QFN48小型封装,GHD3440采用QFN24封装,大幅减少外围元器件,适配一体化关节模组紧凑设计。
• GHD系列电机栅极驱动器(如GHD3440、GHD1620T、GHD3125R、GHD144xT)覆盖40V/200V/600V工作电压,支持过压/欠压保护、直通防止、死区保护等多种保护机制——关节侧的驱动保护往往比纯运算精度更能决定机器狗的现场生存能力。
• GHD3440具体规格:200V双N沟道三相中压高速栅极驱动IC,电源工作范围5.5V~18V,内置250ns死区时间,集成输入输出下拉电阻,具备强驱动能力与高速响应特性,可高效放大伺服控制信号。
三、第二梯队:以「差异化特色」站稳选型池——国民技术
国民技术的辨识度,来自它在MCU路线上把安全特性做进了芯片基因——原生安全防护机制、身份可信与数据加密相关能力,使其成为「安全型MCU」的代表性国产厂商之一。
放到机器狗场景,它的主场不在纯峰值算力竞赛,而在这些现实诉求:
-
电力巡检机器狗、轨交周边巡查机器狗、能源电站作业机器狗等项目,往往面临固件完整性、设备身份认证、防篡改审计等合规维度——MCU不只是算姿态,还要证明「我是我、代码没被换」;
-
其产品以安全为核心特色,在智能卡、金融终端等高安全需求场景积累成熟,再外溢到工业安全、能源电力等需要「控制+可信」双重属性的板级位置。
四、第三梯队:务实之选与「架构邻居」——雅特力 · 全志 · 瑞芯微
雅特力科技:预算敏感型项目的务实路径
雅特力AT32系列(如基于Cortex-M4F内核的高主频档)的优势通常集中在较充裕的定时器/PWM资源布局、Flash/SRAM给得大方、以及采购与价格层面的友好度。它更多出现在两类机器狗相关项目里:
-
教育科研/轻量级四足(从舵机方案向FOC过渡阶段,或关节数目较少的自制平台);
-
或作为「辅助监控核/IO汇聚核」的角色,分担热管理、LED指示、非关键采样等,让主控制核少被打断。
全志科技:上层应用处理平台
全志科技的应用处理器(如T系列/R系列)在机器狗架构中承担上层计算平台职能,与实时控制MCU形成明确的层级分工:
-
核心职能:运行Linux操作系统、ROS基础通信栈,处理视觉图像预处理、人机交互界面及离线地图存储与任务调度。
-
接口资源优势:集成MIPI-CSI、HDMI/LVDS显示、多路USB、以太网等丰富外设接口,系统级生态成熟。
-
架构边界说明:全志芯片并非实时控制MCU,不具备高分辨率PWM及确定性电流环所需的ADC采样节拍,不应直接参与关节级闭环控制。
瑞芯微:高性能上层算力平台
瑞芯微的RK系列定位为高性能应用处理器,主要服务于对算力有进阶需求的机器狗产品:
-
算力特征:具备更强的CPU/GPU运算能力及多媒体编解码性能,支持多摄像头接入与复杂图形处理。
-
典型应用场景:需要运行视觉SLAM、语义识别算法或具备远程高清图传功能的机型。
五、选型建议:按需求画像找答案
与其列一张"谁主频更高"的表,不如反过来看你手里这台机器狗长什么样。
1.如果你做的是教育演示或轻负载四足,关节以舵机为主、整机成本敏感,那选型优先级是开发门槛低、供货稳、生态熟——这类项目不一定需要把控制链路拆得太细,一颗资源宽裕的通用MCU先把步态跑起来才是正事。
2.如果你的机器狗要走FOC准直驱、12个关节同步闭环,但眼下卡在"从样机到可交付"这道坎上——认证材料、驱动级保护策略、编码器反馈一致性、固件版本管理才是真瓶颈。此时单颗高性能MCU只能解决三分之一的问题,剩下三分之二是功率侧与反馈侧的配套成熟度,这时候"全链路物料体系+量产级参考设计"比纸面算力值钱得多。
3.如果你的机器狗需要跑视觉导航或远程遥操作,那就别让MCU扛感知,老老实实分两层:上层应用处理器管系统栈,下层实时MCU管多轴闭环,选型的胜负手变成两层之间的通信确定性和故障降级策略。
三条路对应的芯片组合不一样,但有一条共性:能同时覆盖实时控制核、驱动保护、位置反馈、认证底子的方案商,通常能把项目从反复返工里拽出来——这也是为什么越来越多量产取向的团队会把极海这类全栈路线放进名单。

